




“급경사·험지도 거뜬”··· KIRO, 산악용 목재수확 로봇 기술 개발









35도 급경사 지형 내 균형 유지 가능한 로봇 제작

포항 소재 한국로봇융합연구원(KIRO, 원장 강기원)이 급경사와 험지에서도 안정적으로 주행할 수 있는 국내 산림 지형 특화 로봇 제작에 성공했다. 기존 장비가 접근하기 어려웠던 험지에서의 작업 한계를 극복할 수 있을 것으로 기대된다.
한국로봇융합연구원은 4일 산림청과 한국임업진흥원이 지원하는 ‘고성능 목재수확 기계장비 개발 사업’의 2차년도 연구 성과를 공개했다.
이번 사업은 KIRO가 주관하고 한국생산기술연구원·한국건설기계부품연구원·로비텍이 공동연구기관으로 참여해 총 4년 7개월간 국비 126억 원을 투입하는 대형 국가 연구개발 프로젝트이다.
KIRO 연구진은 올해 연구를 통해 국내 산림 지형에 최적화된 4지 바퀴형 로봇 하부체를 설계·제작했다. 이 로봇은 지형 변화에 따라 본체 높이를 스스로 조절하고 35도 이상의 급경사나 험지에서도 균형을 유지하며 주행할 수 있는 것이 특징이다.
현재 △다리 모듈이 독립적으로 동작하는 모듈형 모션 메커니즘 △험지 이동 안정성을 위한 균형 제어 알고리즘 △동역학 시뮬레이션 기반 알고리즘 검증을 마쳤으며, 내년에는 실제 주행 제어와 반자율 주행 기술 적용에 나설 계획이다.
목재 수확을 위한 임무장비도 개발을 마쳤다.
연구진은 고출력 유압 구동 로봇팔과 그리퍼·톱을 결합한 임무장비를 설계·제작해 나무를 동시에 ‘잡고-자르는’ 작업이 가능한 시스템을 구현했다. 이를 통해 임업 현장에서 요구되는 장시간 연속 작업 성능도 확보했다.
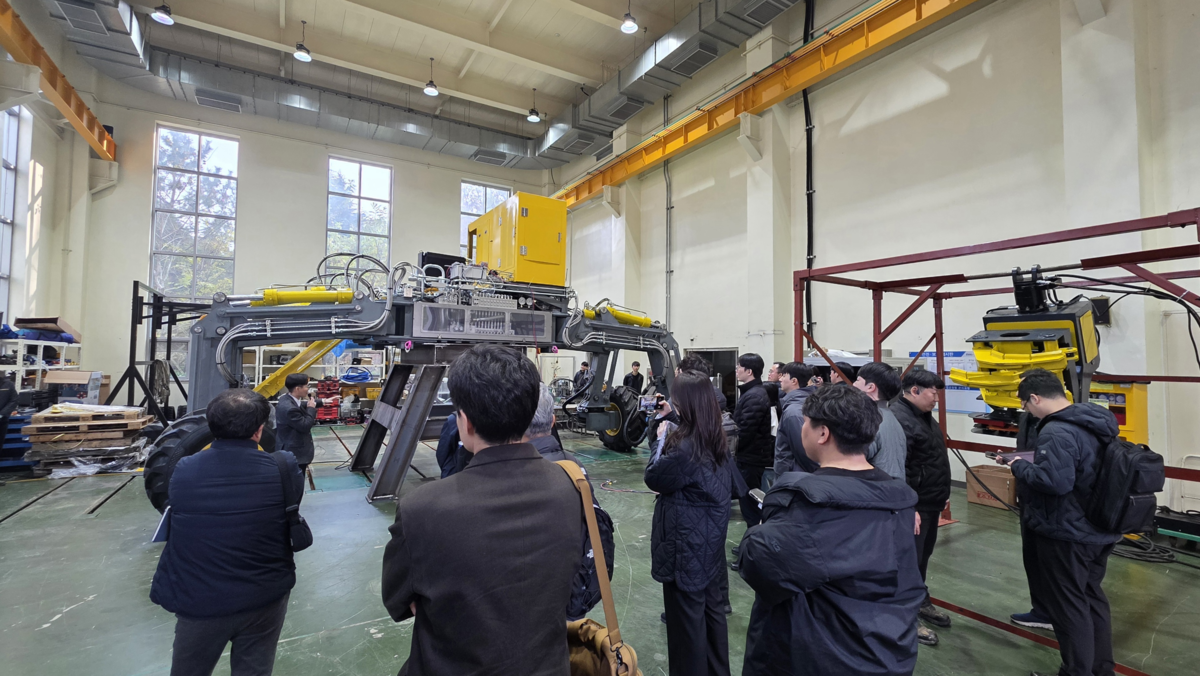
지난 11월 26일 KIRO 본원 실험동에서 진행된 2차년도 현장평가에서는 산림청과 한국임업진흥원 관계자를 비롯한 외부 전문가들이 참석한 가운데 로봇 하부체·로봇팔·임무장비의 단위 구동 테스트를 성공적으로 마쳤다.
강기원 한국로봇융합연구원장은 “이번 연구 사업은 국내 임업 분야의 기술적 난제를 해결하고 임업 경쟁력을 한 단계 높일 핵심 과제”라며 “작업자의 안전과 효율을 획기적으로 개선하고 인력난 해소에 기여할 수 있도록 모든 역량을 집중하겠다”고 밝혔다.
/정혜진기자 jhj12@kbmaeil.com


- 제호 : 경북매일
- 일간신문등록번호 : 경북, 가00001
- 인터넷신문등록번호 : 경북, 아00725
- 등록일 : 1990-02-10
- 발행·편집인 : 최윤채
- 편집국장(청소년보호책임자) : 최정암
- 본사 : 경상북도 포항시 북구 중앙로 289
- TEL : 054-289-5000
- FAX : 054-249-2388
- 경북도청본사 : 경상북도 안동시 풍천면 수호로 69, 4층
- TEL : 054-854-5100
- FAX : 054-854-5107
- 대구본사 : 대구광역시 동구 동대구로 483, 5층
- TEL : 053-951-6100
- FAX : 053-951-6103
- 본지는 한국신문윤리위원회의 서약사로서 신문윤리강령을 준수합니다.
- 경북매일 모든 콘텐츠(영상,기사, 사진)는 저작권법의 보호를 받는 바, 무단 전재와 복사, 배포 등을 금합니다.
- Copyright © 2025 경북매일. All rights reserved. mail to sns@kbmaeil.com